機械安全と冗長(リダンダント)エンコーダの基礎知識|光学式×磁気式の2重検出で実現するWachendorff WDGR/WDGE 58Bシリーズ選定ガイド
2026/05/28
- Wachendorff

伊藤 慎一
機械設備の国際安全規格「ISO 13849-1」の厳格化が進むなか、産業界では「1台のエンコーダが故障しただけで、システム全体の安全機能が失われる」という設計上の潜在的リスクへの対策が急務となっています。
位置や速度の情報を常時二重に監視し、万一の単一故障発生時にもシステムを安全な状態へ移行(安全停止など)させる「冗長エンコーダ」は、いまや風力発電、舞台機構、産業用ロボットといった高度な機能安全が求められる現場の新標準となりつつあります。
本記事では、冗長化設計の基礎(その必要性とメカニズム)を整理するとともに、Wachendorff(ヴァッヘンドルフ)社が誇る画期的な冗長エンコーダ「WDGR / WDGE 58Bシリーズ」を徹底解剖。光学式と磁気式を単一筐体に統合した「ダイバーシティ(異種)冗長」の圧倒的な優位性から、実際の導入事例、最適なモデルを導き出す選定チャートまでを詳しく解説します。
・なぜ今、冗長エンコーダが必要なのか?
・冗長化の仕組み:「冗長」と「ダイバーシティ」の違い
・【深堀り】なぜ「異なる検出原理」が重要なのか
・Wachendorff冗長エンコーダによる課題解決の実績
・WDGR/WDGE 58Bのコアテクノロジー
・高い性能レベル(PL d / SIL 3)をコスト効率よく達成する
・他社製品との比較表
・製品仕様・選定ガイド
なぜ今、冗長エンコーダが必要なのか?

WDGR58B / WDGE58B — 58mmハウジングに2つの独立センサを内蔵
産業オートメーションにおける位置検出は、モーターの回転数管理から昇降機の高さ制御、ロボットアームの角度算出まで、あらゆる動作の根幹を担っています。
従来の単一エンコーダ構成では、センサが故障した瞬間に正確な位置情報が失われ、機械が制御不能に陥るリスクがありました。
ISO 13849-1(機械の安全性に関する国際規格)では、安全機能が喪失した場合のリスクを定量評価し、達成すべき「パフォーマンスレベル(PL)」をaからeの5段階で規定しています。高い安全レベル(PL d / SIL 3)を達成するには、単一のセンサでは構造上の要件(カテゴリ)を満たすことができず、2系統の独立した検出回路(冗長構成)が必須となります。
⚠ 機械安全規格(ISO 13849-1)に適合させるには、システム全体の**MTTFd(平均危険側故障時間)**の算出が必要です。Wachendorff社(ヴァヘンドルフ)製エンコーダのMTTFd値は、要求に応じて提供可能であり、国内総代理店であるケーメックス・オートメーションを通じて入手できます。
冗長エンコーダは、この課題に対するシンプルかつ最適なソリューションです。「2台のエンコーダを別々に設置する」必要がなく、1つのハウジングに2系統の完全に独立したセンサシステムを統合。これにより、大幅な省スペース化と配線の簡素化を同時に実現します。
冗長化の仕組み:「冗長(リダンダント)」と「ダイバーシティ(多様性)」の違い
「冗長(リダンダント)」とは、同一の情報を複数の独立した系統で取得し、万が一システムの一方に異常が生じても、全体の継続動作または安全停止を保証する設計思想です。この冗長性を担保する上で極めて重要なのが、単なる「二重化(同一構成)」と、共通要因故障を防ぐ「ダイバーシティ(多様性)冗長」の決定的な違いです。
冗長化アーキテクチャの比較
【深堀り】なぜ「異なる検出原理」が重要なのか
同一の検出原理(例:光学式×2)で冗長化した場合、「粉塵でスリット板が汚染される」「強烈な振動でガラスディスクが同時に割れる」といった共通原因故障(Common Cause Failure)に対して脆弱です。規格上でも共通原因故障はβ(ベータ)ファクターとして定量化されており、これを低減することが高いPLを達成する鍵となります。
| 比較項目 | 同種冗長 (光学×光学) |
同種冗長 (磁気×磁気) |
ダイバーシティ冗長 (Wachendorff: 光学×磁気) |
|---|---|---|---|
| 粉塵・汚染への耐性 | △ 両系統が弱い | 〇 両系統が強い | ◎ 一方が弱くても他方がカバー |
| 振動・衝撃への耐性 | ✗ 両系統が弱い | 〇 両系統が強い | ◎ 磁気系がカバー |
| 電磁ノイズへの耐性 | 〇 両系統が強い | △ やや影響あり | ◎ 光学系がカバー |
| 共通原因故障リスク(β) | 高(同じ弱点) | 中 | 低(異なる弱点) |
| 構成により達成可能なPL | PL c 〜 d | PL c 〜 d | PL d (SIL 3 対応可) |
Wachendorff冗長エンコーダによる課題解決の実績
ダイバーシティ冗長の基本を踏まえ、実際の現場でどのような課題がWachendorff製品によって解決されているか、代表的な3つの事例を紹介します。
①AGVの速度・操舵制御:インテリジェントセンサー技術による安全性の確保
現場の課題
倉庫や工場内を自律走行するAGV(無人搬送車)は、作業員や他の設備と空間を共有しながら稼働します。そのため、走行速度に応じて安全保護フィールドを動的に拡張し、障害物を検知した際には確実に減速・停止する制御が不可欠です。
しかし、単一のエンコーダのみで速度を計測している場合、センサー故障やノイズによる誤検出が発生すると制御不能に陥り、重大な衝突事故につながるリスクがあります。また、フォークリフト型AGVにおいては、棚への積み下ろし時に数ミリ単位の高度制御が求められるなど、多軸・多用途に対応できる高信頼なセンサーの組み合わせが課題となっていました。
ソリューション:WDGR 58B(冗長インクリメンタルエンコーダ)を採用
速度検出の要として、磁気式と光学式という異なる測定原理を1筐体に統合した冗長インクリメンタルエンコーダ「WDGR 58B」をホイールに採用。信号生成と電源供給が完全に独立しているため、共通原因故障(CCF)を極限まで排除します。出力される2系統の信号は安全コントローラ上で常に照合され、万が一不一致が検出された場合は即座に安全な減速シーケンスへと移行します。
また、操舵(ステアリング)モーターの角度検出には、絶対値中空軸エンコーダ「WDGA 58E」を採用。CANやPROFINETなどの主要ネットワークに対応しているため、距離センサー等との同期制御も容易に実現しています。
 速度検出用冗長エンコーダ WDGR 58B
速度検出用冗長エンコーダ WDGR 58B
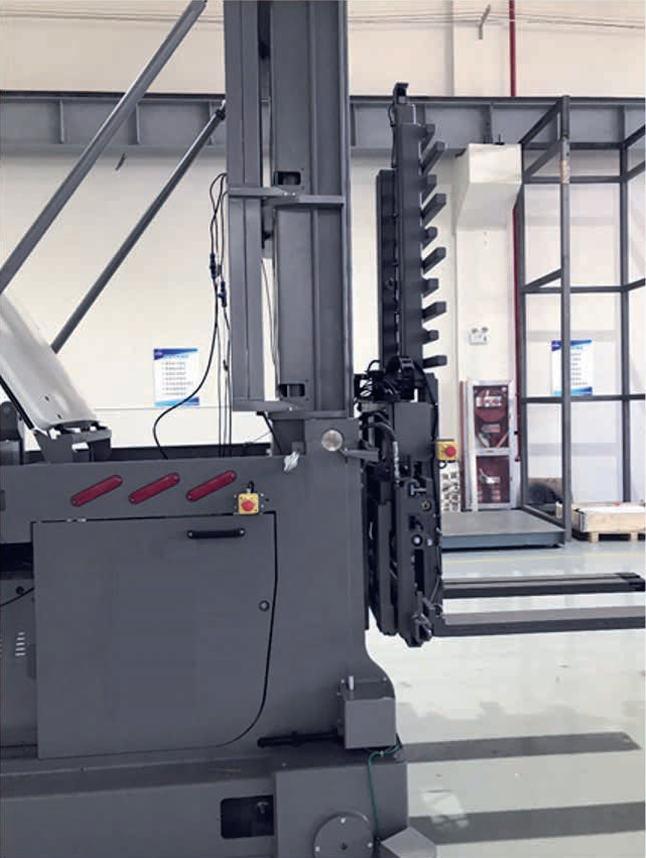 無人搬送車(AVG)
無人搬送車(AVG)
✔ 効果
-
・高水準な安全性の実現(HFT=1) 1筐体での冗長構成により、ハードウェア・フォールトトレランス(HFT)= 1を達成。標準エンコーダを2台設置するよりも省スペースかつ低コストで、同等以上の安全性を確保。
-
・環境変化に強いダイバーシティ設計 磁気式×光学式のハイブリッド設計により、振動や衝撃の激しい過酷な倉庫環境でも、ノイズによる誤検出ゼロを維持。
-
・搬送精度と稼働率の高度な両立 速度・操舵角・高度のそれぞれに最適なエンコーダを配置することで、AGV全体の制御信頼性が向上し、タクトタイムの短縮と高精度な搬送を両立。
WDGR/WDGE 58Bのコアテクノロジー
 2系統のコネクタ(M12×2)が上部に配置。各系統の電源・信号ラインが独立
2系統のコネクタ(M12×2)が上部に配置。各系統の電源・信号ラインが独立
Wachendorff社は、光学式エンコーダ開発において20年以上、磁気式エンコーダ開発において10年以上にわたり、確かな知見と実績を蓄積してきました。このたび開発された冗長エンコーダは、同社が誇るこれら2つのコア技術を単一のハウジングへ見事に集約した、まさに技術力の結晶とも言えるハイエンドモデルです。
■ 磁気式センサモジュール(QuattroMag®)
独自の4素子差動演算アルゴリズム**「QuattroMag®」**により、磁気式でありながら光学式に匹敵する高分解能(最大16bitシングルターン / 43bitマルチターン)を達成。4つのホール素子が出力する差動信号をリアルタイムに演算処理することで、軸の偏心誤差や温度変化、外部からの漂遊磁界の影響を効果的に相殺します。振動・衝撃・粉塵・油分が混在する極めて過酷な環境下でも、常に安定した絶対位置を出力し続けます。
■ 光学式センサモジュール(高精度インクリメンタル)
各センサユニットへの電源ラインを完全に分離することで、片側の電源障害がもう一方の系統へ伝播するリスクを排除。これは安全規格における「共通原因故障(CCF)」を防ぐための、極めて重要な設計思想です。さらに、亜鉛メッキ処理を施した接続カバーと、磁気シールドを兼ねるクロームメッキスチール製ハウジングキャップの組み合わせにより、過酷な現場環境でも強力な電磁シールド効果を発揮します。
■ 完全独立設計:電源も信号も分離
 背面から見た独立ケーブル引き出し構造
背面から見た独立ケーブル引き出し構造
各センサユニットへの電源ラインは完全に分離されており、片方の電源障害がもう一方に伝播しません。これは安全規格上の「共通原因故障」を排除するための重要な設計思想です。接続カバーには亜鉛メッキ処理を施し、磁気シールドを兼ねるクロームメッキスチール製ハウジングキャップと合わせて、強力な電磁シールド効果を発揮します。
■ 堅牢な機械仕様
58mmクランプフランジ型筐体には、最大220 N(径方向)/ 120 N(軸方向)という高い許容軸荷重を誇る2個の精密ボールベアリングを内蔵。ステンレス製シャフト(Ø10mm)は優れた耐食性を備え、過酷な屋外環境でも長期にわたる安定動作を保証します。さらに、動作温度範囲は-40℃〜+85℃(コネクタ仕様)をカバー。極寒の地から高温になる重工業環境まで幅広く対応します。
設計上の重要ポイント:シャフトのフォームフィット接続
非認証品を安全機能に使用する際は、2軸間の結合にフォームフィット(かみ合わせ構造)を採用し、スリップを確実に防止することが規格上の要件です。ケーメックスでは設計アドバイスも承っています
高い性能レベル(PL d / SIL 3)をコスト効率よく達成する
安全機能の実装において、すべてのコンポーネントが安全認証取得品である必要はありません。Wachendorffの冗長エンコーダは「認証を取得した安全部品ではなく、高品質な標準部品の冗長使用」というアプローチで、PL dまたはSIL 3に相当する安全レベルを経済的に達成できます。
冗長エンコーダから出力される2系統の独立したインクリメンタル/アブソリュート信号を、既存の汎用セーフティコントローラ(PLC)や安全速度監視ユニットの通常入力端子に接続するだけで、高い安全レベルを達成できます。別途高価な安全認証取得エンコーダを導入する必要がなく、イニシャルコストとランニングコストを大幅に抑えられます。
✔ ホワイトペーパーで実証
Schmersal社との共同研究により、WDGR58Bと安全ミニコントローラを組み合わせたシステムの安全評価(セットアップモードにおける実用的安全ソリューション)をホワイトペーパーでご確認いただけます。
ホワイトペーパーをダウンロード
他社製品との比較表
| 比較項目 | 市販の認証取得 安全エンコーダ |
汎用エンコーダ2台 別体設置 |
Wachendorff WDGR/WDGE 58B |
|---|---|---|---|
| 検出原理 | 単一原理 | 同種or異種(任意) | 光学+磁気(ダイバーシティ) |
| 設置スペース | コンパクト | 大(2台分) | 1台分(58mmΦ) |
| 配線 | シンプル | 複雑(2系統別引き回し) | 集約(2x M12コネクタ) |
| 電源独立性 | 〇 | 〇 | 〇(完全分離) |
| コスト(部品) | 高(認証プレミアム) | 中 | 中〜低(標準部品) |
| コスト(設置・配線) | 低 | 高 | 低 |
| 共通原因故障への対策 | △(同一原理の場合) | △〜〇(設計による) | ◎(ダイバーシティ設計) |
| 達成PL | PL e(認証品) | 設計依存 | PL d(SIL 3対応可) |
| MTTFd提供 | 〇 | 〇 | 〇(要請に応じて提供) |
| 保護等級 | IP65〜67 | 製品による | IP65(シャフト部)/ IP67(ハウジング) |
製品仕様・選定ガイド
Wachendorffの冗長エンコーダは現在2系統の組み合わせ構成を提供しています。用途・要求する位置情報の種類によって選択してください。
共通仕様(WDGR/WDGE 58B)

選定チャート
信頼性・安全性・コスト効率を高次元でバランスさせたWachendorff冗長エンコーダは、次世代の機械安全設計に求められる要件を標準部品で満たせる革新的なソリューションです。安全規格への適合設計から設置サポートまで、ケーメックス・オートメーションにお任せください。
|
|

伊藤 慎一プロダクトマネージャー
新着記事
-
2026/06/26
-
2026/06/26
-
2026/05/29
-
2026/05/29
【ROPEX連載 第2回】ROPEX製品体系の全体像——最適シールを導く「RESISTRON」と「CIRUS」の使い分け
-
2026/05/28
機械安全と冗長(リダンダント)エンコーダの基礎知識|光学式×磁気式の2重検出で実現するWachendorff WDGR/WDGE 58Bシリーズ選定ガイド